What are Brushless DC Motors
Brushless DC motors have revolutionized the world of motion control, offering superior efficiency, reliability, and performance compared to their brushed counterparts.
In this blog post, we will delve into the intricacies of brushless DC motors, exploring their unique design, operating principles, and the numerous advantages they bring to the table.
What are Brushless DC Motors
Brushless DC (BLDC) motors are a type of synchronous electric motor that has gained popularity in recent years due to their high efficiency, reliability, and precise control capabilities. Unlike traditional brushed DC motors, BLDC motors utilize electronic commutation instead of a mechanical commutator and brushes, resulting in a more compact motor structure and reduced maintenance requirements.
Components of Brushless DC Motors
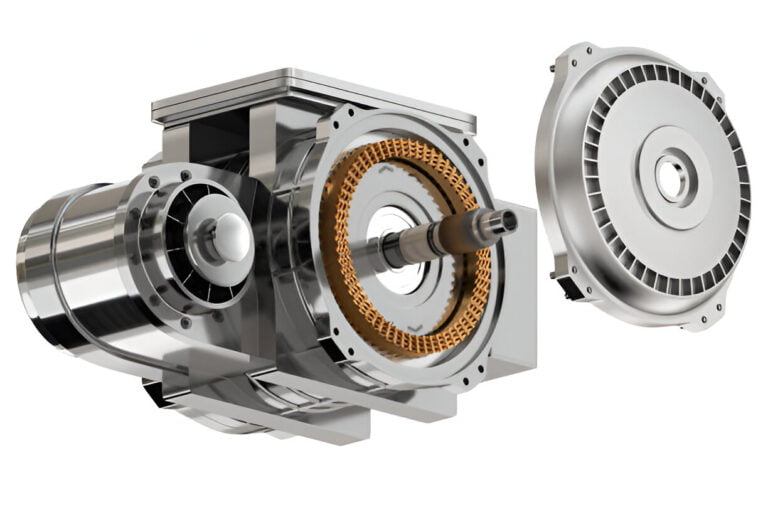
Brushless DC (BLDC) motors are composed of several key components that work together to enable efficient and precise operation. The main components of a BLDC motor include the stator with wound coils, the rotor with permanent magnets, and the electronic controller with sensors.
Stator with Wound Coils
The stator is the stationary part of the BLDC motor and consists of a series of electromagnetic coils arranged in a specific pattern. These coils are typically made of copper wire and are wound around iron cores to form the stator windings.
When electrical current passes through these coils, they generate a magnetic field that interacts with the permanent magnets on the rotor, causing the rotor to rotate.
Rotor with Permanent Magnets
The rotor is the rotating part of the BLDC motor and is composed of permanent magnets. The interaction between the permanent magnets on the rotor and the electromagnetic field generated by the stator coils causes the rotor to rotate.
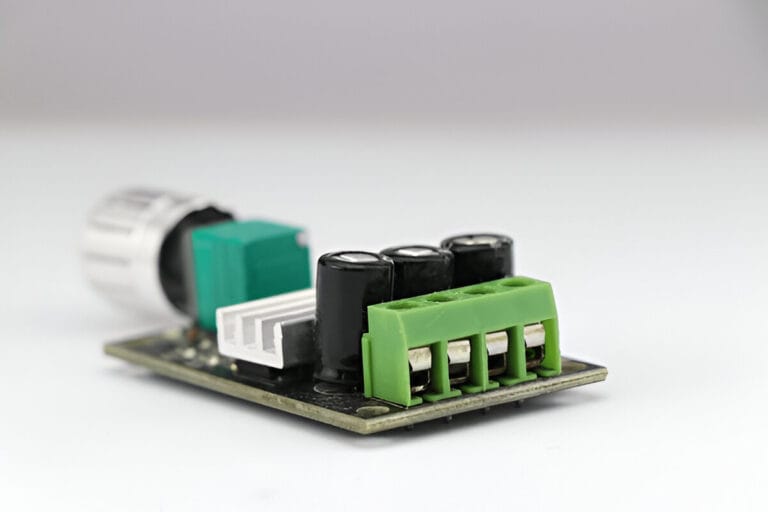
Electronic Controller and Sensors
The electronic controller, also known as an electronic speed controller (ESC), is responsible for regulating the power supply to the stator coils and controlling the motor’s speed and direction. It uses pulse-width modulation (PWM) to generate the necessary electrical signals to drive the motor.
Sensors, such as Hall effect sensors or encoders, are used to detect the rotor’s position and provide feedback to the electronic controller. This feedback allows the controller to determine the appropriate sequence and timing of electrical pulses to be sent to the stator coils, ensuring smooth and efficient operation.
Inrunner Vs Outrunner Configurations
BLDC motors can be designed in two main configurations: inrunner and outrunner.
In an inrunner configuration, the rotor is located inside the stator, and the permanent magnets are mounted on the rotor’s surface. This design allows for a compact motor structure and is commonly used in applications requiring high speeds and low torque.
An outrunner configuration has the rotor located outside the stator, with the permanent magnets mounted on the inner surface of the rotor. This design provides a larger rotor diameter, allowing for higher torque output and lower speeds. Outrunner BLDC motors are often used in applications such as drones, electric vehicles, and industrial automation.
Working Principle of Brushless DC Motors
The working principle of brushless DC (BLDC) motors relies on the precise control of electromagnetic coils and permanent magnets to generate rotational motion. Unlike brushed DC motors, BLDC motors use electronic commutation instead of a mechanical commutator to control the electric current in the stator windings.
The working principle of BLDC motors can be summarized as follows:
- The ESC receives a DC power input and converts it into a three-phase alternating current (AC) signal.
- The three-phase current is supplied to the stator coils in a specific sequence, creating a rotating magnetic field.
- The permanent magnets on the rotor are attracted to the rotating magnetic field, causing the rotor to spin in synchronization with the stator’s field.
- The ESC continuously adjusts the power supplied to the stator coils based on the rotor’s position, which is determined using either Hall effect sensors or back-EMF (electromotive force) detection methods.
- By precisely controlling the sequence and timing of the power supply to the stator coils, the ESC maintains the rotor’s synchronization with the stator’s magnetic field, enabling smooth and efficient rotation.
Advantages of Brushless DC Motors
- High Efficiency: BLDC motors exhibit excellent efficiency due to the absence of brushes and the reduced friction and electrical losses associated with them.
- Low Maintenance: The lack of brushes in BLDC motors eliminates the need for periodic brush replacement and maintenance.
- High Power Density: BLDC motors offer a high power-to-weight ratio, making them compact and lightweight compared to other motor types with similar power output.
- Precise Speed and Torque Control: The electronic commutation in BLDC motors allows for precise control over the motor’s speed and torque.
- Wide Speed Range: BLDC motors can operate over a wide range of speeds, from low to high, without compromising efficiency or performance.
- Low Noise and Vibration: The smooth operation and absence of brushes in BLDC motors result in reduced acoustic noise and vibration compared to brushed motors.
- Long Lifespan: The absence of mechanical commutation and the reduced wear and tear on components contribute to the extended lifespan of BLDC motors.
- Improved Heat Dissipation: BLDC motors often feature improved heat dissipation mechanisms, such as built-in cooling fans or heat sinks, which help in maintaining optimal operating temperatures and preventing overheating.
- Enhanced Reliability: The robust construction, absence of brushes, and reduced mechanical stress make BLDC motors more reliable compared to brushed motors. They are less susceptible to failures caused by brush wear, commutator issues, or electrical arcing.
Disadvantages of Brushless DC Motors
Despite their numerous advantages, Brushless DC (BLDC) motors also have some limitations and disadvantages:
- Higher Initial Cost: BLDC motors typically have a higher initial cost compared to brushed DC motors due to their complex construction and the requirement for advanced electronic controllers.
- Complex Control Requirements: BLDC motors rely on sophisticated electronic controllers for their operation.
- Need for Electronic Controller: Unlike brushed DC motors, which can be operated directly from a DC power source, BLDC motors require an electronic controller to function.
- Electromagnetic Interference (EMI): The high-frequency switching of the electronic controller in BLDC motors can generate electromagnetic interference.
- Sensitivity to Voltage Fluctuations: BLDC motors are sensitive to voltage fluctuations in the power supply. Sudden changes in voltage can affect the motor’s performance and may cause unexpected behavior or even damage to the motor or controller.
- Limited Torque at Low Speeds: In some BLDC motor designs, the torque output may be limited at low speeds due to the absence of a mechanical commutator.
- Potential for Cogging Torque: BLDC motors, especially those with a low number of poles, may experience cogging torque. Cogging torque refers to the slight hesitation or unevenness in the motor’s rotation caused by the interaction between the permanent magnets and the stator slots. This can result in torque ripple and affect the smoothness of operation at low speeds.
- Dependence on Rotor Position Sensing: Sensored BLDC motors rely on accurate rotor position sensing for proper commutation. If the position sensors fail or provide inaccurate feedback, it can lead to inefficient operation or even motor failure.
- Limited Overload Capability: BLDC motors have a limited ability to handle overload conditions compared to some other motor types. Excessive current draw or mechanical overloading can cause permanent damage to the motor windings or the electronic components.

Common Types of Motors
There are two main categories of electric motors: AC motors and DC motors.
AC Motors
AC motors, or alternating current motors, are powered by alternating current electricity. They are widely used in various industrial and commercial applications due to their simplicity, reliability, and low maintenance requirements. The most common types of AC motors include:
- Induction Motors: Also known as asynchronous motors, induction motors rely on electromagnetic induction to generate torque. They consist of a stator with wound coils and a rotor with conductive bars. When AC current is applied to the stator, it creates a rotating magnetic field, inducing current in the rotor and causing it to rotate.
- Synchronous Motors: These motors operate at a constant speed determined by the frequency of the AC power supply. The rotor of a synchronous motor contains permanent magnets or electromagnets that lock into synchronization with the rotating magnetic field generated by the stator.
DC Motors
DC motors, or direct current motors, are powered by direct current electricity. They offer excellent speed control, high starting torque, and a wide range of operating speeds. The main types of DC motors include:
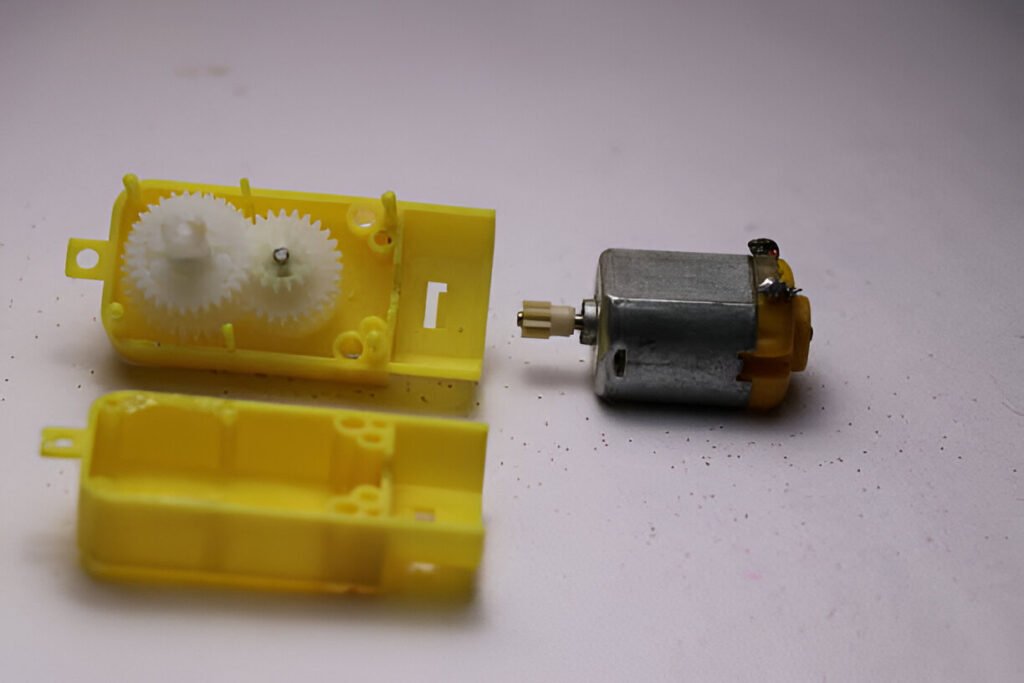
- Brushed DC Motors: These motors consist of a stator with permanent magnets and a rotor with windings connected to a mechanical commutator. As the rotor rotates, the commutator switches the direction of current flow in the windings, maintaining the rotor’s rotation.
- Brushless DC (BLDC) Motors: BLDC motors eliminate the need for a mechanical commutator and brushes. Instead, they use an electronic controller to switch the current in the stator windings based on the rotor’s position.
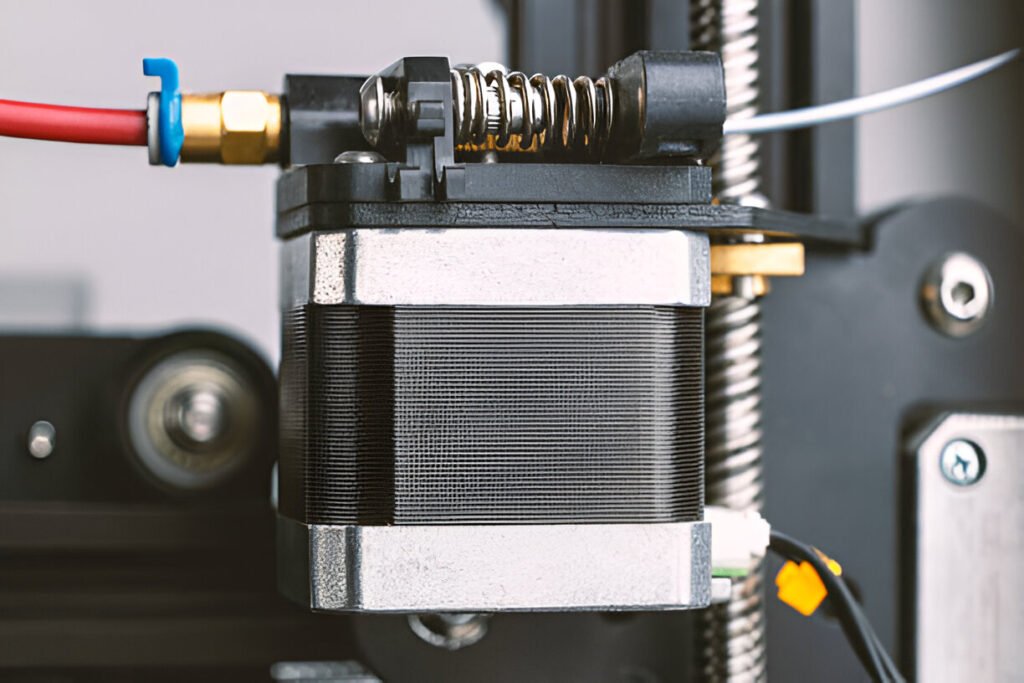
- Stepper Motors: These motors rotate in precise increments, or steps, allowing for accurate position control. Stepper motors have a rotor with permanent magnets and a stator with multiple windings. By energizing the windings in a specific sequence, the motor can be made to rotate in precise steps.

Types of Brushless DC Motors
Brushless DC (BLDC) motors come in various configurations to suit different applications and requirements.
Single-phase Brushless DC Motors
Single-phase BLDC motors are the simplest type of brushless motor, featuring a single stator winding and a permanent magnet rotor. These motors are typically used in low-power applications, such as small fans and pumps, where precise control and high efficiency are not critical. Single-phase BLDC motors are generally less expensive than their multi-phase counterparts and offer a compact motor structure.
Multi-phase Brushless DC Motors
Multi-phase brushless DC motors are the most common type of BLDC motor, with three-phase motors being the most prevalent. These motors feature multiple stator windings, usually arranged in a star or delta configuration, and a permanent magnet rotor. The electronic controller sequentially energizes the stator windings, creating a rotating magnetic field that interacts with the rotor’s permanent magnets, causing the rotor to rotate.
Multi-phase BLDC motors offer higher power density, better torque control, and smoother operation compared to single-phase motors. They are widely used in applications such as electric vehicles, robotics, and industrial automation.
Sensored Brushless DC Motors
Sensored BLDC motors incorporate position sensors, such as Hall effect sensors or encoders, to provide feedback on the rotor’s position to the electronic controller. This allows for precise control of the motor’s speed, torque, and position.
Sensored BLDC motors are ideal for applications that require high-precision positioning, such as robotics, CNC machines, and medical devices. The additional sensors and wiring can increase the cost and complexity of the motor system, but the improved control and performance often justify the added expense.
Sensorless Control Brushless DC Motors
Sensorless control BLDC motors eliminate the need for physical position sensors by employing advanced control algorithms to estimate the rotor’s position based on the back-EMF (electromotive force) generated in the stator windings. This reduces the cost and complexity of the motor system while maintaining good performance.
Sensorless control techniques, such as trapezoidal commutation and field-oriented control (FOC), enable the electronic controller to optimize the motor’s performance without the need for additional sensors. Sensorless BLDC motors are commonly used in applications where cost is a concern, and the required level of control can be achieved without physical sensors, such as in HVAC systems, pumps, and fans.
Axial Flux BLDC Motors
Axial flux BLDC motors feature a unique geometry where the stator and rotor are arranged parallel to each other, with the magnetic flux flowing axially through the motor. This configuration allows for a compact motor structure with a high power density, making axial flux BLDC motors well-suited for applications with limited space, such as electric vehicles and drones.
The axial flux design also enables better heat dissipation, which can improve the motor’s efficiency and lifespan. However, axial flux BLDC motors can be more complex to manufacture and may have a higher cost compared to traditional radial flux motors.
Applications of Brushless DC Motors
Brushless DC (BLDC) motors find extensive use across various industries due to their high efficiency, precise control, and low maintenance requirements. Some common applications include:
- Electric Vehicles: BLDC motors are widely used in electric cars, scooters, and bikes for propulsion, offering high torque density and efficiency.
- Industrial Automation: BLDC motors drive conveyor systems, robotic arms, CNC machines, and other automation equipment, providing accurate positioning and smooth operation.
- HVAC Systems: Brushless motors are used in air conditioners, ventilation fans, and heat pumps for their energy efficiency and quiet operation.
- Home Appliances: Washing machines, refrigerators, and vacuum cleaners often incorporate BLDC motors for their reliability and low noise levels.
- Computer Peripherals: Hard disk drives, DVD/CD drives, and printers use BLDC motors for their fast response times and accurate positioning.
- Power Tools: Cordless drills, saws, and grinders benefit from the high power density and efficiency of brushless motors.
- Pumps and Compressors: Brushless motors drive fluid pumps and air compressors in various industrial and residential settings for their energy efficiency and long lifespan.
Control Methods and Drive Systems
Brushless DC motors require specialized control methods and drive systems to ensure optimal performance and efficiency. The following are some common control techniques used with BLDC motors:
Trapezoidal vs Sinusoidal Control
Trapezoidal control, also known as six-step commutation or square-wave control, energizes the motor windings in a sequence that produces a trapezoidal back-EMF waveform. This method is simpler to implement but can result in torque ripple and acoustic noise.
Sinusoidal control, or field-oriented control (FOC), drives the motor with a sinusoidal current waveform that closely matches the back-EMF. This results in smoother torque output, reduced vibration, and quieter operation, but requires more complex control algorithms and higher-resolution position feedback.
Field-oriented Control (FOC)
FOC is an advanced control technique that decouples the stator current into separate torque-producing and flux-producing components. By independently controlling these components, FOC achieves precise torque, speed, and position control while maximizing efficiency. This method requires accurate rotor position feedback and complex mathematical transformations, making it more computationally intensive than trapezoidal control.
Sensorless Control Techniques
Sensorless control eliminates the need for dedicated position sensors, reducing cost and improving reliability. These techniques estimate the rotor position using the motor’s electrical parameters, such as back-EMF or current ripple. Some common sensorless control methods include:
- Back-EMF Zero Crossing Detection: This method detects the zero-crossing points of the motor’s back-EMF to estimate the rotor position. It is simple to implement but may suffer from reduced accuracy at low speeds.
- Flux Linkage Estimation: By estimating the stator flux linkage using voltage and current measurements, the rotor position can be determined without sensors. This method offers improved low-speed performance compared to back-EMF sensing.
- High-Frequency Injection: By injecting a high-frequency voltage signal into the motor windings, the rotor position can be estimated from the resulting current response. This technique enables precise control even at standstill and low speeds.